Robot de transmisión diferencial
eduACTIVO permite programar el movimiento de un robot virtual, simulando factores físicos como la inercia y la fricción, usando un lenguaje de programación por bloques, muy similar a Scratch.
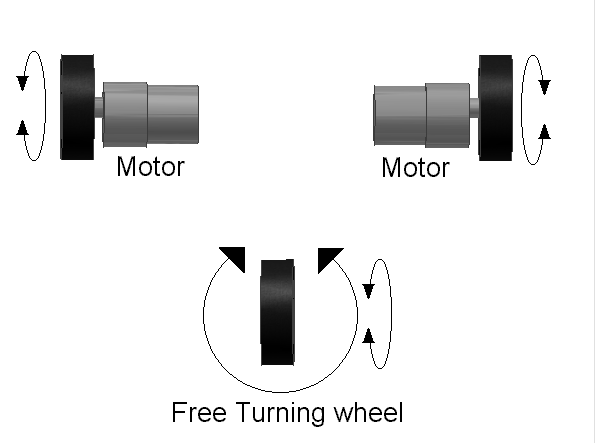
El robot utiliza el control diferencial, se comporta similar a uno con dos ruedas conectadas a dos motores controlados de manera individual, más una rueda loca para mantener el equilibrio.
- Cuando ambas ruedas tienen la misma velocidad, el robot avanza en línea recta.
- Cuando la velocidad de las ruedas difiere, el robot vira.
- Si la rueda izquierda tiene mayor velocidad, el robot gira a la derecha (sentido horario)
- Si la rueda derecha tiene mayor velocidad, el robot gira a la izquierda (sentido anti-horario)
- Cuando las ruedas tienen velocidades opuestas, el robot gira en el lugar.
